


Комплекс
полунатурного моделирования
полунатурного моделирования
Программно-аппаратные решения для проектирования и систематических испытаний встраиваемых систем управления в режиме жесткого реального времени
РИТМ






Комплекс
полунатурного моделирования
полунатурного моделирования
Программно-аппаратные решения для проектирования и систематических испытаний встраиваемых систем управления в режиме жесткого реального времени
РИТМ
Мотивация использования
Сложность разрабатываемых систем растет в геометрической прогрессии, что приводит к увеличивающимся требованиям по испытанию систем. Проводить натурные испытания необходимо, но крайне дорого, поэтому разработчики авиационной техники и вооружений сокращают объем натурных и летных испытаний за счет математического и полунатурного моделирования (ММ и ПНМ соответственно).
Промышленность ожидает следующее соотношение между типами испытаний:
КПМ РИТМ — это отечественное серийное решение, которое призвано освободить ресурсы компаний, и вместо построения стендов сфокусироваться непосредственно на проектировании систем. Это достигается за счет масштабируемой, легко настраиваемой, реконфигурируемой платформы, в которую входят универсальные аппаратные и унифицированные программные средства для ММ и ПНМ.
Промышленность ожидает следующее соотношение между типами испытаний:
- Снижение доли натурных и летных испытаний с 85% до 50%
- Увеличение доли испытаний на стендах ММ с 5% до 20%
- Увеличение доли испытаний на стендах ПНМ с 10% до 30%
КПМ РИТМ — это отечественное серийное решение, которое призвано освободить ресурсы компаний, и вместо построения стендов сфокусироваться непосредственно на проектировании систем. Это достигается за счет масштабируемой, легко настраиваемой, реконфигурируемой платформы, в которую входят универсальные аппаратные и унифицированные программные средства для ММ и ПНМ.
Запрос буклета
Нажимая на кнопку, вы даете согласие на обработку персональных данных и соглашаетесь с политикой конфиденциальности.
Введение в тестирование в реальном времени
Комплекс полунатурного моделирования
При организации математического моделирования систем функциональные модели подсистем запускаются на нескольких ПК, которые связаны друг с другом по сети ethernet. Такое моделирование позволяет увидеть взаимное влияние и обмен информацией между подсистемами в первом приближении. Однако, при такой организации тестирования не учитываются задержки или эффекты квантования при передаче сигналов через физические интерфейсы. Более того, операционные системы общего назначения вносят задержки и управляют временем просчета модели по своим приоритетам.
Это приводит к тому, что темп расчета модели не соответствует темпу работы реального объекта управления, блока управления или исполнительных механизмов.
Это приводит к тому, что темп расчета модели не соответствует темпу работы реального объекта управления, блока управления или исполнительных механизмов.
Для решения этих сложностей используются специализированные ПК с физическими интерфейсами (цифровые и аналоговые входы и выходы, MIL-STD-1553, ARINC 429, CAN, RS-485, SPI, I2C и т.д.) и операционной системой реального времени (ОСРВ), которая гарантирует завершение счета математической модели в заданное время с передачей информации в другие подсистемы по физическим интерфейсам.
Такой тип моделирования и называется полунатурным, и такое тестирование организуется на платформе КПМ РИТМ.
Презентация полунатурных стендов
Наша презентация полунатурных стендов на крупнейшей инженерной конференции по модельно-ориентированному проектированию
Как это работает?
1
Математическая модель
Убеждаемся, что модель работает верно на ПК и подготавливаем ее для запуска на КПМ РИТМ с помощью пошаговой инструкции.
2
Интерфейсы
Добавляем в модель блоки драйверов из библиотеки для передачи/захвата сигналов по интересующим интерфейсам.
3
Реальное время
Компилируем модель в приложение и запускаем на ОСРВ в режиме жесткого реального времени.
Технические особенности
КПМ РИТМ поддерживает различные интерфейсы для
общения с внешним миром, взаимодействие с которыми
для пользователя выглядит как добавление блока работы с соответствующей периферией в модель и настройку его параметров.
общения с внешним миром, взаимодействие с которыми
для пользователя выглядит как добавление блока работы с соответствующей периферией в модель и настройку его параметров.
Базовые интерфейсы
- ЦАП и АЦП
- Цифровые входы/выходы
- Генерация и захват ШИМ
- Квадратурный энкодер/декодер
- SPI и I2C
- Автомобильные протоколы
- MIL-STD-1553
- ARINC 429
- RS-232/422/485
- Fibre Channel
- ПЛИС
- Spacewire
- Ethernet
- ...добавим любой нужный вам интерфей
Удобные инструменты для разработчика
- Доступ к параметрам модели во время исполнения в реальном времени как в ручном, так и в автоматизированном режиме из скриптов
- Регистрация выбранных сигналов на встроенный накопитель или на хост-систему для последующего анализа
- Вывод сигналов в виде осциллографа на подключенный монитор для визуального контроля
- Создание инструментальных панелей для удобного управления стендом
- Автоматизация регрессионного тестирования для запуска тестов в нерабочее время
- Распараллеливание счета на многоядерном CPU
- Профилирование модели и кода
- Подключение исходных кодов на языке С или Fortran в модель
- Возможность объединения нескольких КПМ РИТМ в единую систему
- Различные варианты исполнения: «Производительный» и «Мобильный»
Каждый стенд конфигурируется
под ваши нужды
под ваши нужды
Мы учитываем необходимое количество и скорость работы интерфейсов,
сложность ваших математических моделей и условия эксплуатации
сложность ваших математических моделей и условия эксплуатации
Варианты исполнения стендов
- ЦПУ: 3.4 ГГц
- ОЗУ: 16 Гб
- Eth: 2 шт
- Габариты: 235x153x222
- ЦПУ: 3.7 ГГц, 12 ядер
- ОЗУ: 32 Гб
- Eth: 3x2.5 Гбит
- Габариты: 483х177х518 (4U)
- ЦПУ: 2.9 ГГц
- ОЗУ: 16 Гб
- Eth: 2 шт
- Габариты: 482x177x450 (4U)
Поддерживаемые интерфейсы
- ЦАП и АЦПГибко настраиваемые аналоговые входы и аналоговые выходы
- Цифровые входы и выходы
Цифровые входы и выходы, дискретные сигналы - Автомобильные протоколыПоддержка промышленных и автомобильных протоколов: CAN, LIN, FLexRay, SENT, XCP, J1939 и CANOpen
- MIL-STD-1553
Мультиплексный канал (МКИО) с поддержкой полного перечня форматов и команд по ГОСТ 26765.52-87 - ARINC 429Подключение к последовательному интерфейсу и дискретным каналам по
ГОСТ 18977-79 - Шина SPIПоследовательный периферийный интерфейс с поддержкой режимов Master и Slave
- Шина I²CШина I2C (IIC) с поддержкой режимов работы Master и Slave
- Fibre ChannelПодключение во высокоскоростному оптическому каналу и поддержка режима DMA
- Генерация и захват ШИМГенерация и захват высокоскоростного ШИМ
- Квадратурный энкодер/декодерПрием и эмуляция сигналов датчика угла поворота
- Последовательный портПередача и прием данных по интерфейсам RS-232/422/485
- LVDT/БСКТЭмуляция и захват сигналов датчика линейного перемещения или бесконтактного вращающегося трансформатора
- IEC 61850Интерфейсы для цифровой подстанции с поддержкой:
- SV
- GOOSE
- IEEE 1588 PTP
- PRP
- C.37
- ПЛИСРазработка специализированных цифровых интерфейсов на базе ПЛИС с возможностью автоматической генерации HDL кода
- SpacewireПоддержка телекоммуникационной сети для космических аппаратов
- EthernetПоддержка Raw Ethernet, TCP/IP, UDP
- Промышленные интерфейсыКоммуникационнные протоколы Modbus и EtherCAT
- Любой необходимый вам интерфейс появится быстрее, чем вы подпишете договор на закупку этого стенда
Сценарий 1: RCP
Быстрое прототипирование алгоритмов управления в реальном времени
Постановка задачи
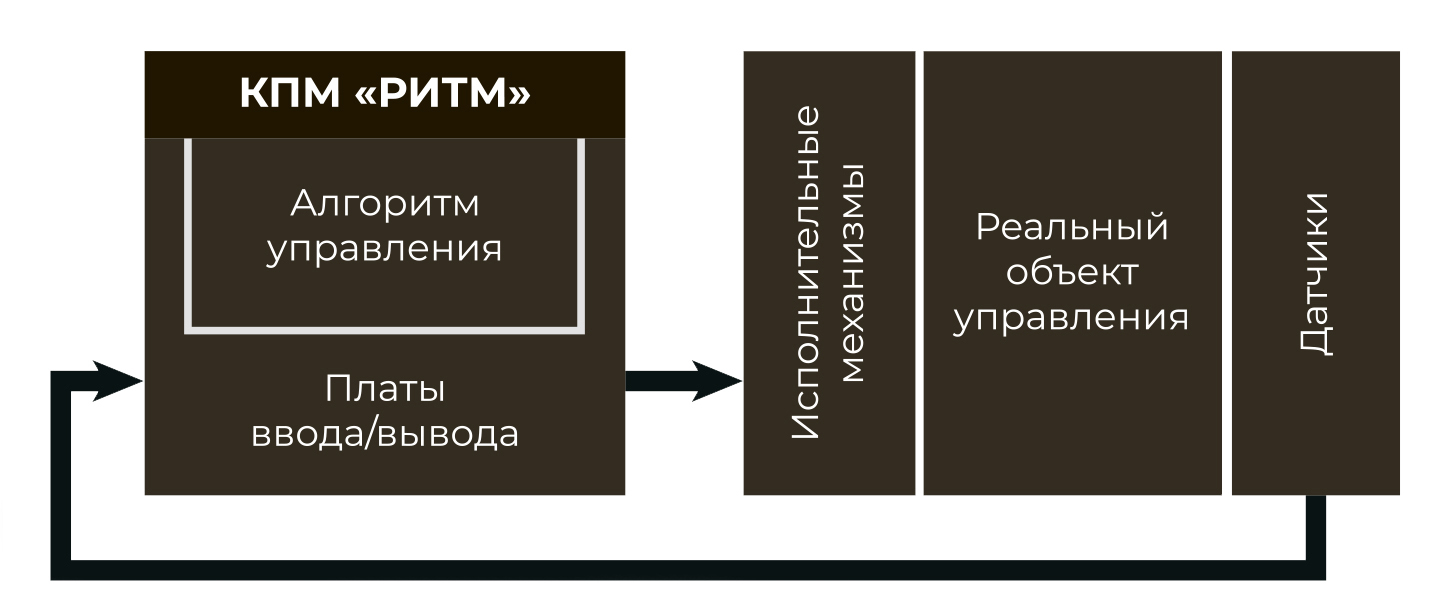
Необходимо протестировать придуманный алгоритм управления, когда он написан на «бумаге» или в виде модели, но не перенесен на электронный блок управления по причине недоступности самого вычислителя или долгих итераций при реализации алгоритма на вычислителе программистами.
Решение
Необходимо произвести подключение КПМ РИТМ к испытываемой системе вместо электронного блока управления, который недоступен, и произвести запуск модели алгоритма управления в режиме жесткого реального времени буквально по нажатию одной кнопки. Таким образом можно убедиться, что выбранный алгоритм управления работает корректно, если же нет, то производится коррекция и повторный запуск модели.
Такой подход позволяет проводить быстрые итерации при разработке алгоритмов управления в реальном окружении, не обладая профессиональными навыками программиста.
Необходимо протестировать придуманный алгоритм управления, когда он написан на «бумаге» или в виде модели, но не перенесен на электронный блок управления по причине недоступности самого вычислителя или долгих итераций при реализации алгоритма на вычислителе программистами.
Решение
Необходимо произвести подключение КПМ РИТМ к испытываемой системе вместо электронного блока управления, который недоступен, и произвести запуск модели алгоритма управления в режиме жесткого реального времени буквально по нажатию одной кнопки. Таким образом можно убедиться, что выбранный алгоритм управления работает корректно, если же нет, то производится коррекция и повторный запуск модели.
Такой подход позволяет проводить быстрые итерации при разработке алгоритмов управления в реальном окружении, не обладая профессиональными навыками программиста.
Сценарий 2: HIL
Испытание блоков управления, бортовых вычислителей и контроллеров на полунатурных моделях
Постановка задачи
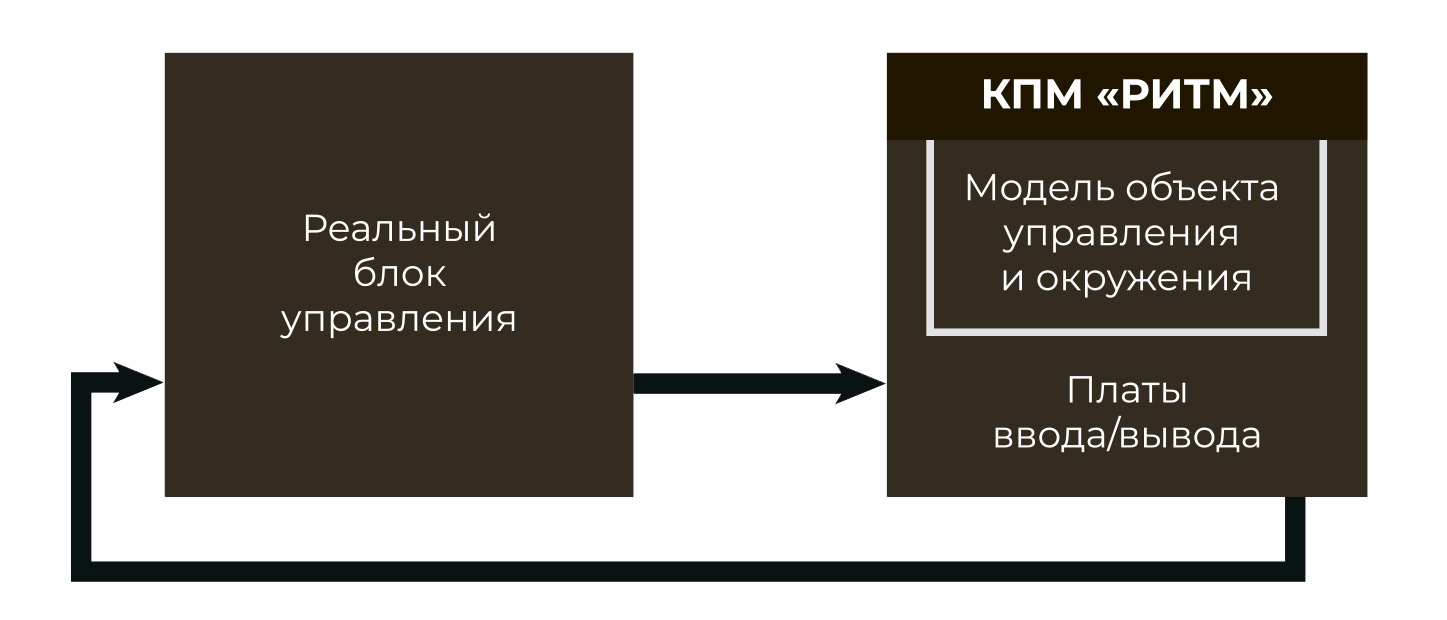
Необходимо провести испытания готового блока управления, однако этот процесс может быть очень дорог, требовать специальных и труднодостижимых условий, а также быть небезопасным для здоровья людей или сохранности испытываемого изделия.
Решение
Необходимо подключить разработанный блок управления к КПМ РИТМ, на котором запущена математическая модель объекта управления или окружения в режиме жесткого реального времени. Такой подход позволяет проводить систематические комплексные испытания в любых режимах эксплуатации без риска нанесения вреда изделию или испытателям в лабораторных условиях.
К такому стенду можно подключать реальные устройства, которые уже доступны, или постепенно заменять математические модели реальными компонентами, входящими в состав изделия.
Необходимо провести испытания готового блока управления, однако этот процесс может быть очень дорог, требовать специальных и труднодостижимых условий, а также быть небезопасным для здоровья людей или сохранности испытываемого изделия.
Решение
Необходимо подключить разработанный блок управления к КПМ РИТМ, на котором запущена математическая модель объекта управления или окружения в режиме жесткого реального времени. Такой подход позволяет проводить систематические комплексные испытания в любых режимах эксплуатации без риска нанесения вреда изделию или испытателям в лабораторных условиях.
К такому стенду можно подключать реальные устройства, которые уже доступны, или постепенно заменять математические модели реальными компонентами, входящими в состав изделия.
Проконсультируйтесь
со специалистом
со специалистом
Мы проводим пусконаладку стенда на вашей территории, обучаем специалистов работе с оборудованием и помогаем адаптировать модели к запуску в реальном времени